This is not a "text-to-image in 5 minutes" post.
This is not hype.
This is the actual math and code behind modern generative AI.
If Part 1 taught you how neural networks learn, this post teaches you how modern image generators exist at all.
### Table of Contents
- What Is a Diffusion Model, Really?
- The Forward Diffusion Process (Adding Noise)
- The Noise Schedule (Why It Matters)
- Sampling Noisy Images at Any Timestep
- What the Model Is Trained to Predict
- The UNet Architecture
- Loss Function and Training Objective
- The Training Loop
- Reverse Diffusion (Image Generation)
- Why Diffusion Models Actually Work
- Final Thoughts
### What Is a Diffusion Model, Really?
A diffusion model does not generate images directly.
Instead, it learns one very specific skill:
Given a noisy image, predict the noise that was added to it.
That’s it.
If you can do that reliably at every noise level, you can:
- start from pure noise
- repeatedly remove noise
- end up with a realistic image
This idea is borrowed from statistical physics and probability theory, not biology.
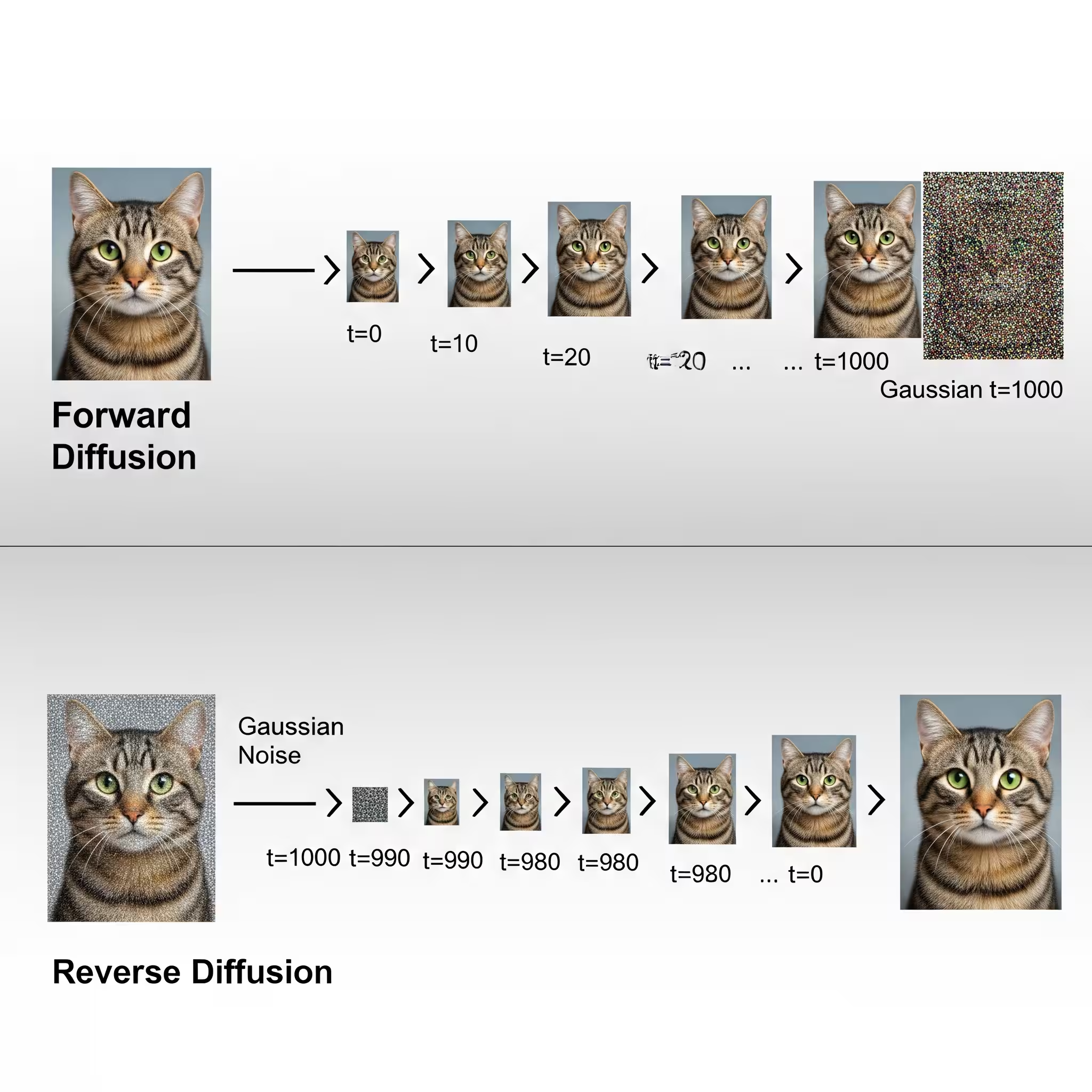
### The Forward Diffusion Process (Adding Noise)
The forward process slowly destroys information.
At timestep (t = 0), the image is clean.
At timestep (t = T), the image is pure Gaussian noise.
This happens gradually to avoid destroying structure too quickly.
### The Noise Schedule (Why It Matters)
We control how much noise is added at each step using a beta schedule.
import torch
def linear_beta_schedule(timesteps):
beta_start = 0.0001
beta_end = 0.02
return torch.linspace(beta_start, beta_end, timesteps)#### Explanation
betacontrols noise variance per step- Small values preserve structure early
- Larger values ensure complete destruction later
- Linear schedules are simple and stable for learning
More advanced models use cosine schedules, but the concept is identical.
### Sampling Noisy Images at Any Timestep
Instead of adding noise step-by-step, diffusion uses a closed-form equation:
[
x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1 - \bar{\alpha}_t} \epsilon
]
This allows direct sampling at any timestep.
def q_sample(x_start, t, noise=None):
if noise is None:
noise = torch.randn_like(x_start)
sqrt_alpha_hat = torch.sqrt(alphas_cumprod[t])[:, None, None, None]
sqrt_one_minus = torch.sqrt(1 - alphas_cumprod[t])[:, None, None, None]
return sqrt_alpha_hat * x_start + sqrt_one_minus * noise#### Explanation
x_startis the clean imagenoiseis Gaussian noise- The model sees all corruption levels, not just extreme cases
This single equation makes diffusion computationally practical.

### What the Model Is Trained to Predict
The model does not predict images.
It predicts:
[
\epsilon_\theta(x_t, t)
]
Which means:
The noise that produced the current image.
Predicting noise instead of pixels:
- stabilizes training
- avoids blurry outputs
- aligns with maximum likelihood estimation
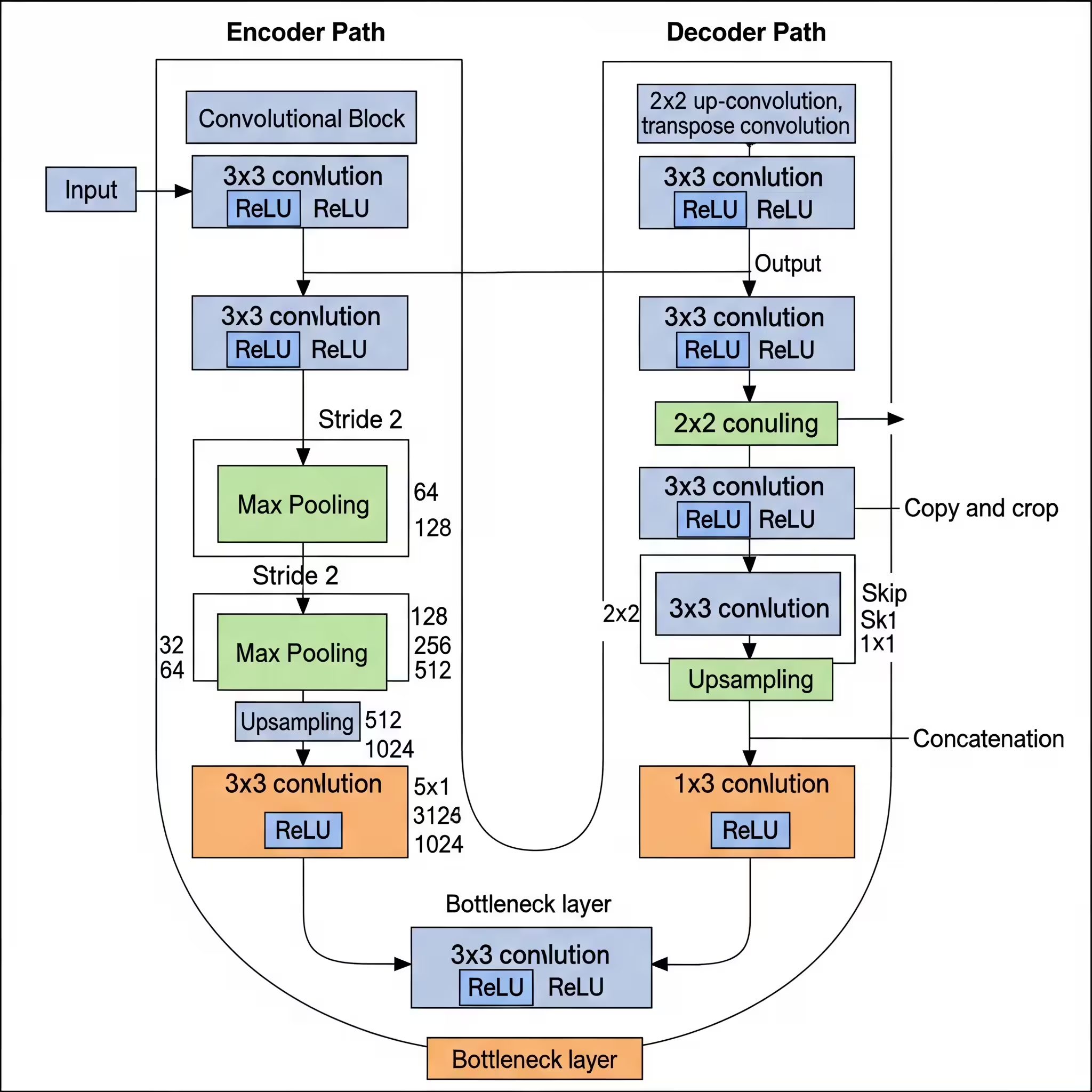
### The UNet Architecture
Diffusion models use UNets because they:
- preserve spatial information
- capture global context
- reconstruct fine details
import torch.nn as nn
class SimpleUNet(nn.Module):
def __init__(self):
super().__init__()
self.down1 = nn.Sequential(
nn.Conv2d(3, 64, 3, padding=1),
nn.ReLU()
)
self.down2 = nn.Sequential(
nn.Conv2d(64, 128, 3, padding=1),
nn.ReLU()
)
self.up1 = nn.Sequential(
nn.ConvTranspose2d(128, 64, 3, padding=1),
nn.ReLU()
)
self.out = nn.Conv2d(64, 3, 1)
def forward(self, x):
d1 = self.down1(x)
d2 = self.down2(d1)
u1 = self.up1(d2)
return self.out(u1)This minimal UNet is enough to understand diffusion deeply.
### Loss Function and Training Objective
The training objective is simple:
def diffusion_loss(model, x_start, t):
noise = torch.randn_like(x_start)
x_noisy = q_sample(x_start, t, noise)
noise_pred = model(x_noisy)
return nn.MSELoss()(noise_pred, noise)#### Why MSE?
- Noise is Gaussian
- MSE corresponds to maximum likelihood
- Predicting noise avoids instability
The model learns to reverse corruption — not to hallucinate images.
### The Training Loop
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
for epoch in range(epochs):
for images in dataloader:
t = torch.randint(0, timesteps, (images.size(0),))
loss = diffusion_loss(model, images, t)
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(f"Epoch {epoch} | Loss: {loss.item()}")#### What This Teaches the Model
- All noise levels are learned
- No discriminator needed
- Training is slow but stable
This stability is why diffusion replaced GANs.
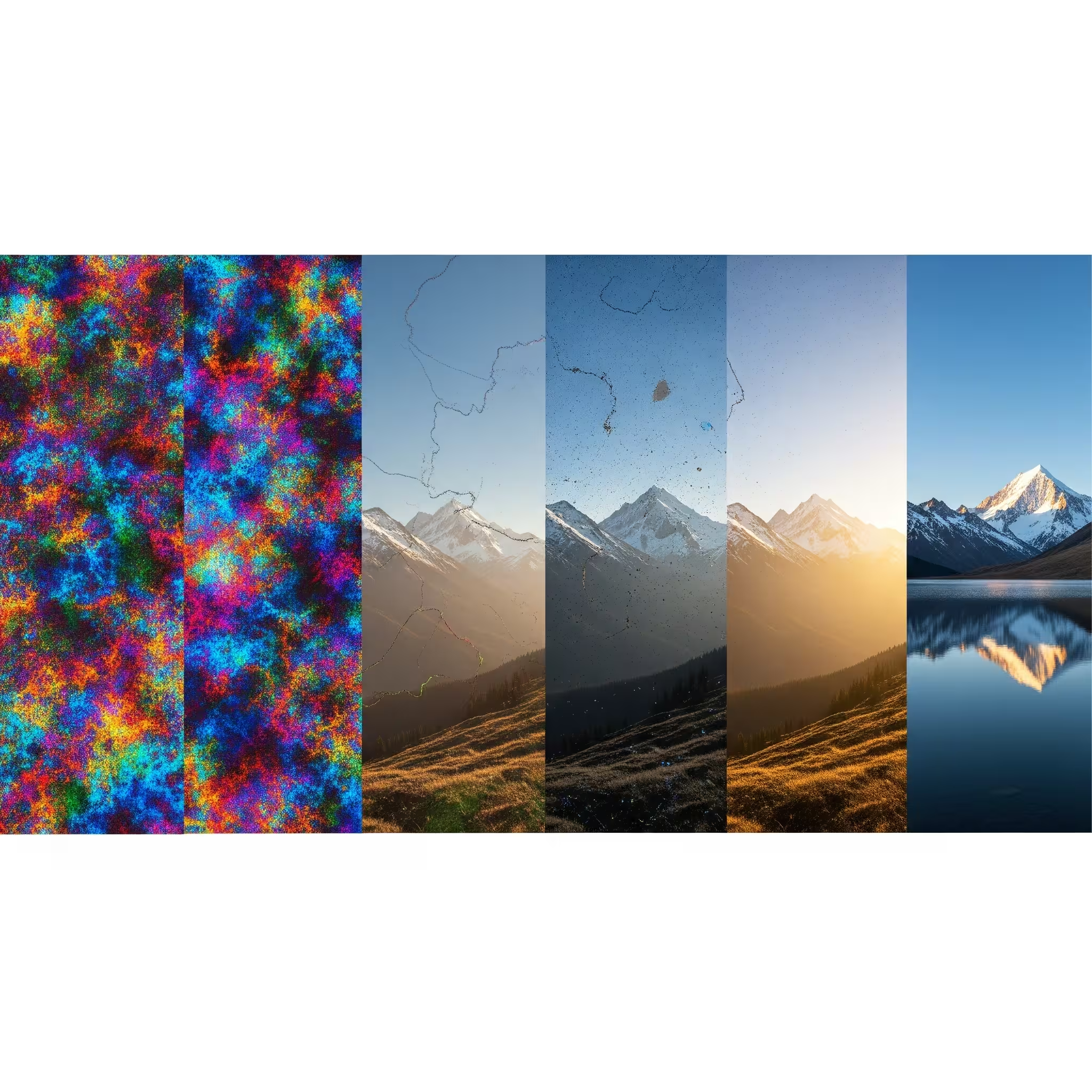
### Reverse Diffusion (Image Generation)
Image generation is the reverse of noise addition.
@torch.no_grad()
def sample(model, shape):
x = torch.randn(shape)
for t in reversed(range(timesteps)):
noise_pred = model(x)
alpha = alphas[t]
alpha_hat = alphas_cumprod[t]
beta = betas[t]
x = (1 / torch.sqrt(alpha)) * (
x - ((1 - alpha) / torch.sqrt(1 - alpha_hat)) * noise_pred
)
if t > 0:
x += torch.sqrt(beta) * torch.randn_like(x)
return xThis loop slowly reveals structure from randomness.
### Why Diffusion Models Actually Work
Diffusion models succeed because they:
- model the full data distribution
- avoid adversarial instability
- reduce generation to denoising
They trade speed for reliability.
### Final Thoughts
Diffusion models are not magic.
They are patience, math, and repetition.
If you understand this post, you understand the foundation of:
- Stable Diffusion
- DALL·E
- Imagen
This is Part 2.
Next comes conditioning, latent diffusion, and real-world scaling.